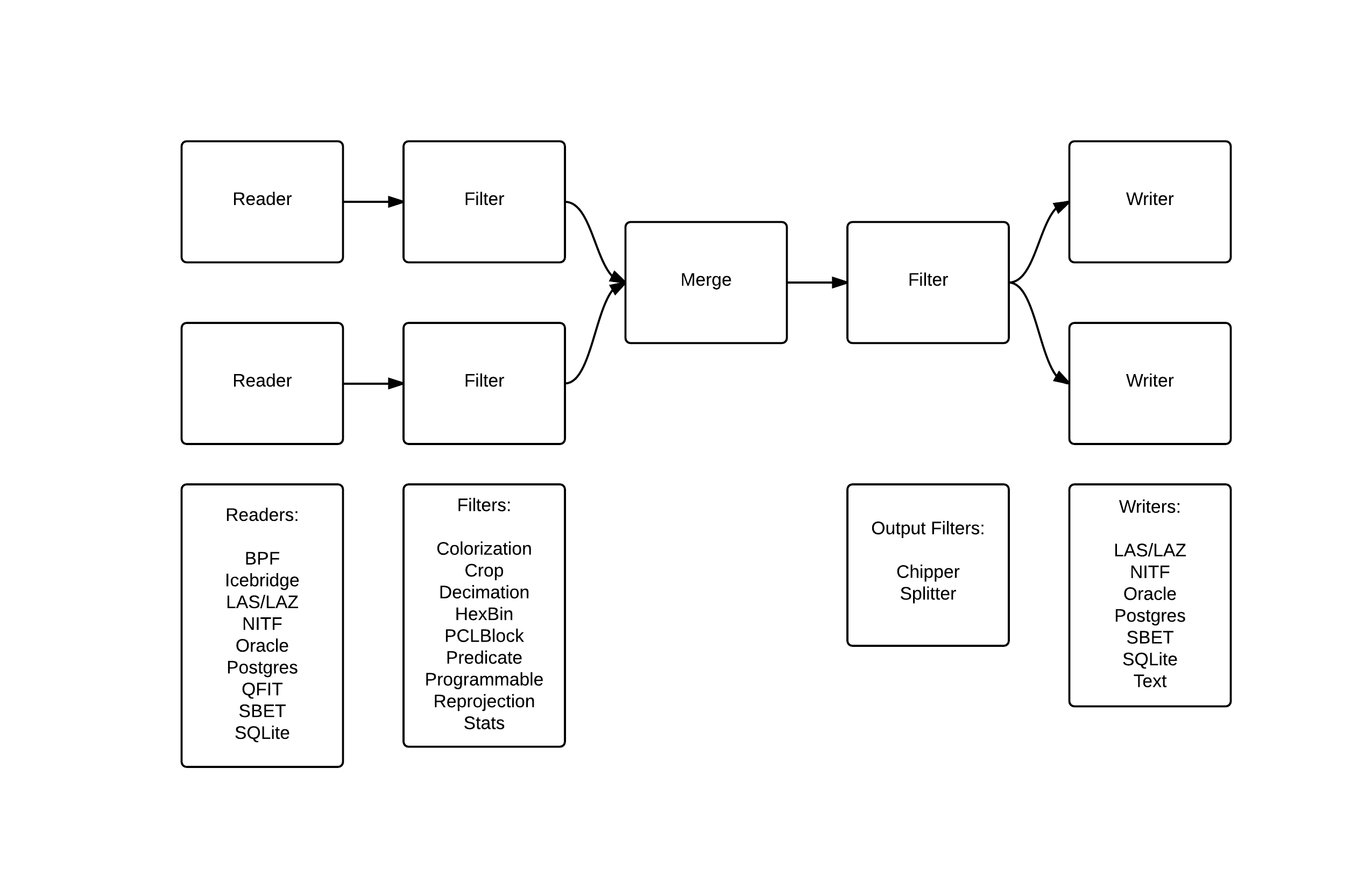
PDAL (Github)is a C++ BSD library for translating and manipulating point cloud data. It is very much like the GDAL library which handles raster and vector data. The About page provides high level overview of the library and its philosophy. Visit Readers and Writers to list data formats it supports, and see Filters for filtering operations that you can apply with PDAL.
PCL (Github) s a large scale, open project for point cloud processing. The PCL framework contains numerous state-of-the art algorithms including filtering, feature estimation, surface reconstruction, registration, model fitting and segmentation. These algorithms can be used, for example, to filter outliers from noisy data, stitch 3D point clouds together, segment relevant parts of a scene, extract keypoints and compute descriptors to recognize objects in the world based on their geometric appearance, and create surfaces from point clouds and visualize them – to name a few.
PDAL
PCL
Basic functions for CUDA streams management:
- NPPST Core
- NPPST Image Processing
- NPPST Signal Processing
Modules:
- Module common
- Module features
- Module filters
- Module geometry
- Module io
- Module kdtree
- Module keypoints
- Module octree
- Module outofcore
- Module recognition
- Module registration
- Module sample_consensus
- Module search
- Module segmentation
- Module surface
- Module visualization